
EthernetIP 协议一般用于采集机器人,控制器等设备的数据。 下面介绍通过远创智控YC-EIPM-PN网关把EtherNet/IP协议的川崎机器人通过西门子1500PLC的控制方法。有些 EIP 的从站设备提供了 EDS 文件,可以从EDS 文件中获取点位信息。这些信息是需要填写到网关中。

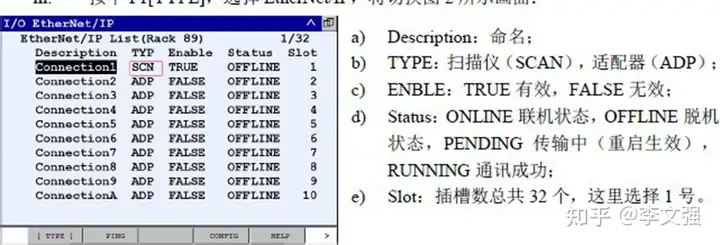
1,一般 EIP 设备上也有对应的显示和配置。请参考设备的使用说明书,先把 EIP 设备设置成 EIP 的从站, 并且启动连接通道。
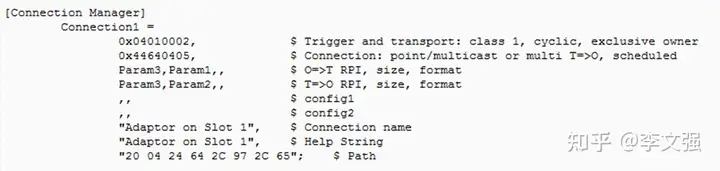
2. 打开设备的 eds 文件,找到如下格式的内容。定位到 [Connection Manager],找到 Connection 的
Path,类似 "20 04 24 64 2C 97 2C 65"; $ Path。定位 24 2C 2C, 24 后面的是Configruation(100), 2C 后面分别是 Output(150), Input(101)。Instance 的值是 1。
3. 举例:20 04 24 01 2C 78 2C 82:Output(120), Input(130)
4. 如果 Path 类似"20 04 25 00 64 00 2D 00 C6 00 2D 00 C7 00"; 则定位 25 00, 2D 00 2D 00, 后
面的 2byte 是 Instance,这种情况 vs 中 Instance Number Size 需配置成 2。另外,常用的
Input/Ouput/Configuration Instance 范围 0-255,1 个字节,但有些从站Instance 范围用 0-
65535,需要 2 个字节。
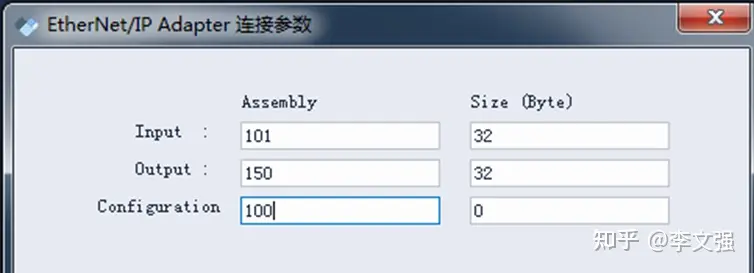
获取到相关的值后,网关中的配置如下
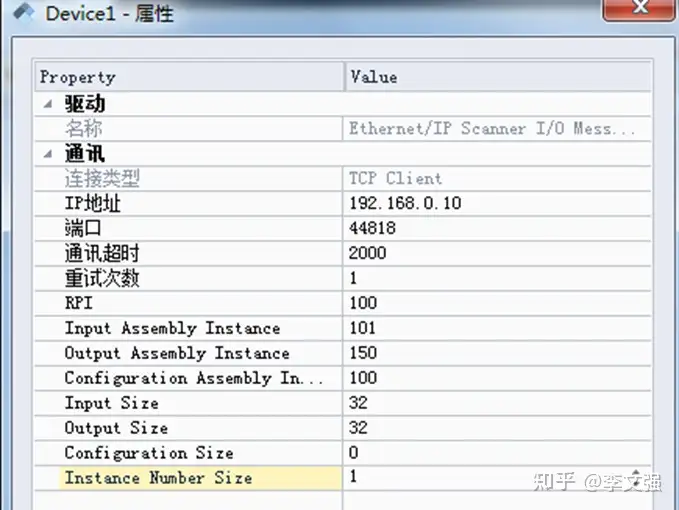
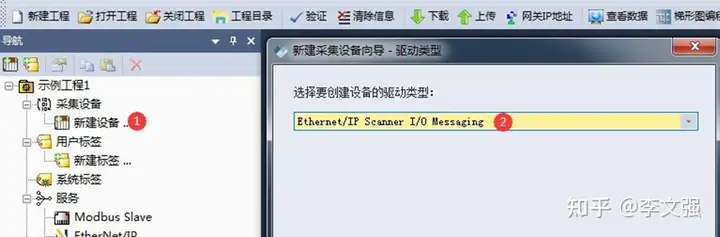
5.点击“新建设备”,驱动类型选择Ethrnet/ip Scanner
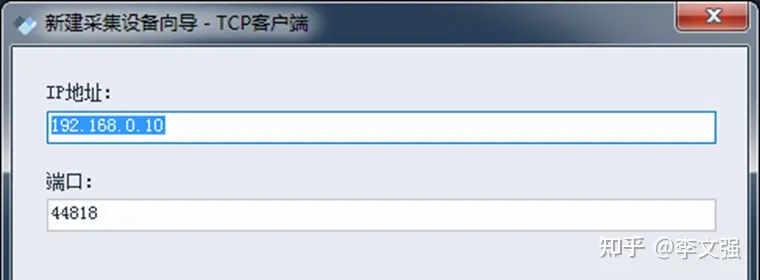
6. 把川崎机器人的IP和端口号填入进去。
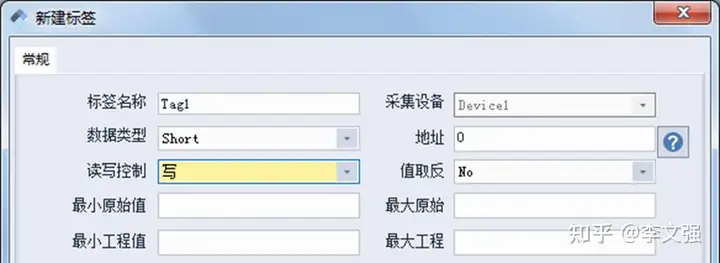
7.数据到 EIP 设备的配置如下,读写类型设置成“写” 然后就配置完成了
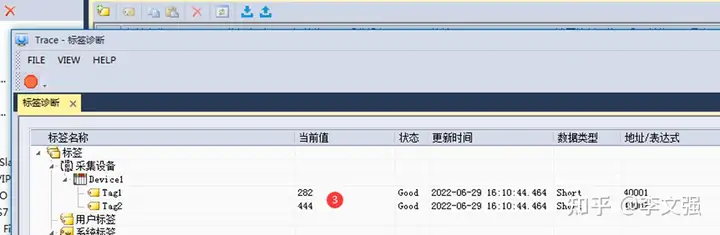
8.点击菜单“查看数据”,查看网关采集到的数据。对比一下当前值,“状态”显示 Good,更新时间为当前时间就代表采集到了数据。
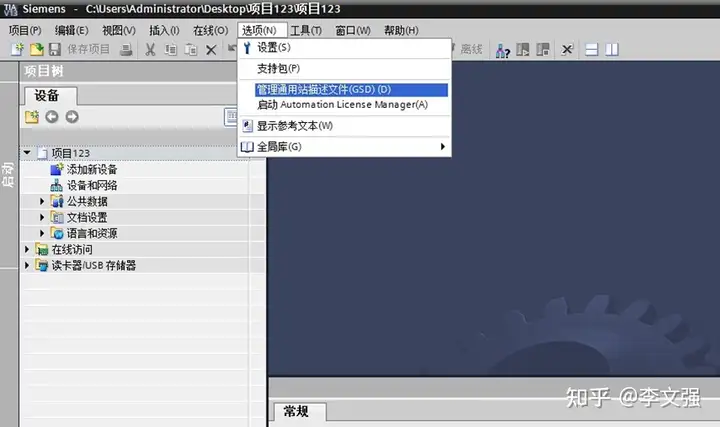
导入 GSD 文件到西门子 PLC
首先,在博途中新建一个项目,然后通过“选项”——“管理通用站描述文件”来添加网关的GSD文件。选择GSD文件所在的目录,点击安装。
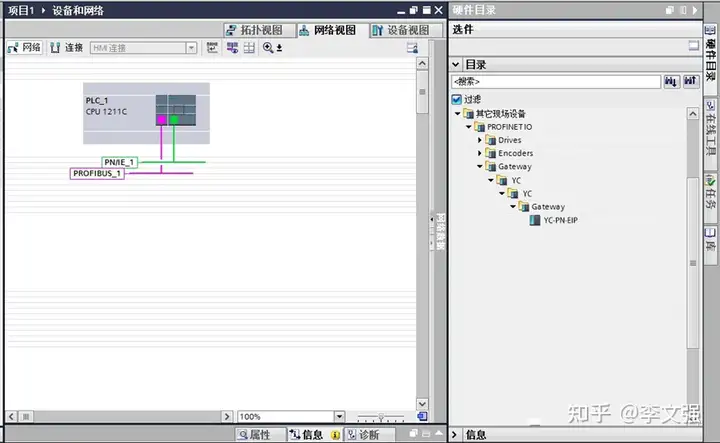
在“设备和网络”中添加网关,给网关分配PLC,构建Profinet链接。
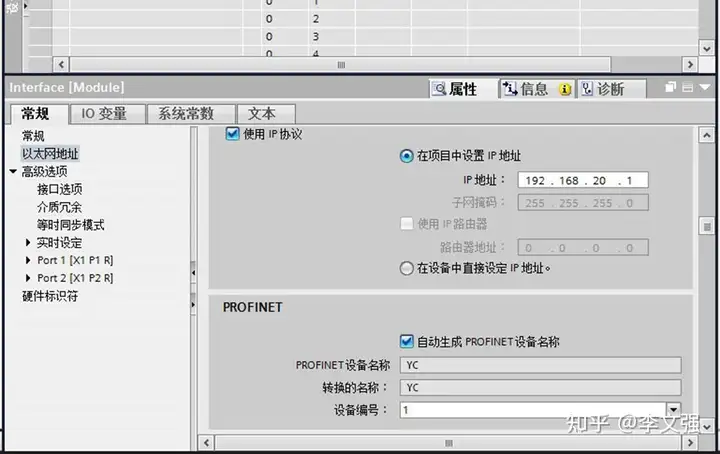
双击网关的图标,进入设备视图,设置网关的IP地址、子网掩码、设备名称。
写入程序块就可以通过远创智控YC-EIPM-PN网关来控制川崎机器人。
楼主最近还看过



 客服
客服


 小程序
小程序


 公众号
公众号








 工控网智造工程师好文精选
工控网智造工程师好文精选
